Research
methodology
The
proposed
project represents one
of the first attempts to decompose surface EMG during dynamic muscle
contractions. It integrates the latest findings in the areas of
isometric
surface EMG decomposition, compound signal analysis, modelling of
surface EMG,
electronics, robotics with haptic interfaces and neurophysiology.
Surface
EMG are being acquired by flexible 2D adhesive arrays of electrodes,
designed
in Laboratory
of Engineering of Neuromuscular System and Motor Rehabilitation (LISiN)
at
Politecnico
di Torino,
Italy. Implementation modalities and performance of these
electrode arrays have been progressively improved by exploiting
flexible
printed circuit technology, screen printing on thin plastic supports,
embedding
electrodes in flexible silicon rubber supports or in clothing (Fig. 1). With
respect to
dry electrode systems, these electrodes employ conductive gel, have a
skin-electrode contact more stable over time and present smaller
movement
artefacts, even during fast dynamic contractions.
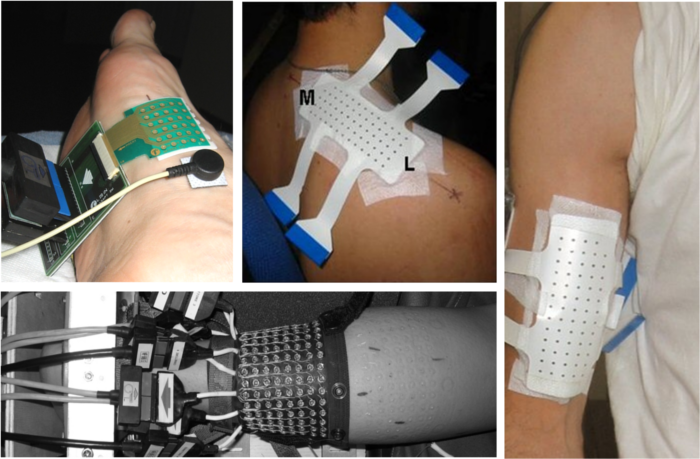 Fig. 1.
Examples of surface electrode arrays: Flexible printed circuit with 5x6
electrodes (upper-left photo), array of electrodes screen
printed on mylar,
applied with a double adhesive foam on a triceps (upper-central
photo) and biceps brachii muscle (upper-right
photo) and array of silver
coated eyelets on cloth (lower-left photo).
Conductive gel is injected into the eyelets. (Courtesy
of LISiN laboratory,
Politecnico di Torino.)
Fig. 1.
Examples of surface electrode arrays: Flexible printed circuit with 5x6
electrodes (upper-left photo), array of electrodes screen
printed on mylar,
applied with a double adhesive foam on a triceps (upper-central
photo) and biceps brachii muscle (upper-right
photo) and array of silver
coated eyelets on cloth (lower-left photo).
Conductive gel is injected into the eyelets. (Courtesy
of LISiN laboratory,
Politecnico di Torino.)
Despite
the recent considerable literature
concerning the development and the application of electrode arrays, the
detection of surface EMG, both in ergonomics and in rehabilitation, is
still
currently based almost exclusively on single electrode pairs that
provide a
very limited local information strongly dependent on the location of
the
electrodes. This leads to poor repeatability of measurements. In
addition, loss
of contact has major consequences because of lack of redundancy. In
this
project, 2D grids of electrodes are being used, performing a sampling
of the
muscular electrical activity over a large surface area (Fig. 2).
Namely,
the analysis of individual motor unit properties from surface EMG
requires the
identification and classification of action potentials significantly
contributing to the signal. This task is possible only if the motor
units are
uniquely represented by their surface action potentials. Contrary to
intramuscular recordings, the number of motor units with surface action
potentials significantly different from each other is very small when
the
action potentials are recorded with only a few electrodes (Fig. 2).
However, the number of identifiable motor units increases substantially
with
the number of channels used for the discrimination. For example, in
study by
Farina et al. (Detecting the unique representation of
motor-unit action
potentials in the surface electromyogram. J Neurophysiol, 2008),
more than
80% of experimentally detected motor units had unique surface
representation
when systems of 5×5 electrodes, spaced by 3-mm distance, were used to
record
isometric surface EMG from the abductor digiti minimi muscle. In the
same
study, one monopolar or bipolar recording allowed the discrimination of
less
than 5% of the motor units. In addition, preliminary results from the
European
project “Cybernetic Manufacturing Systems (CyberManS)” show that
different
workers performing the same task use their muscles in different ways.
Since
there is large inter-individual variability, it is clear that an EMG
acquisition system must cover the entire muscle(s) of interest and
adapt to
their particularities. Thus, in general conditions, concurrent
recordings from several
locations over the skin surface are required. This requirement is even
stronger
in dynamic conditions, with muscle tissue moving relatively to the skin
surface
and, consequently, relatively to the acquisition system.
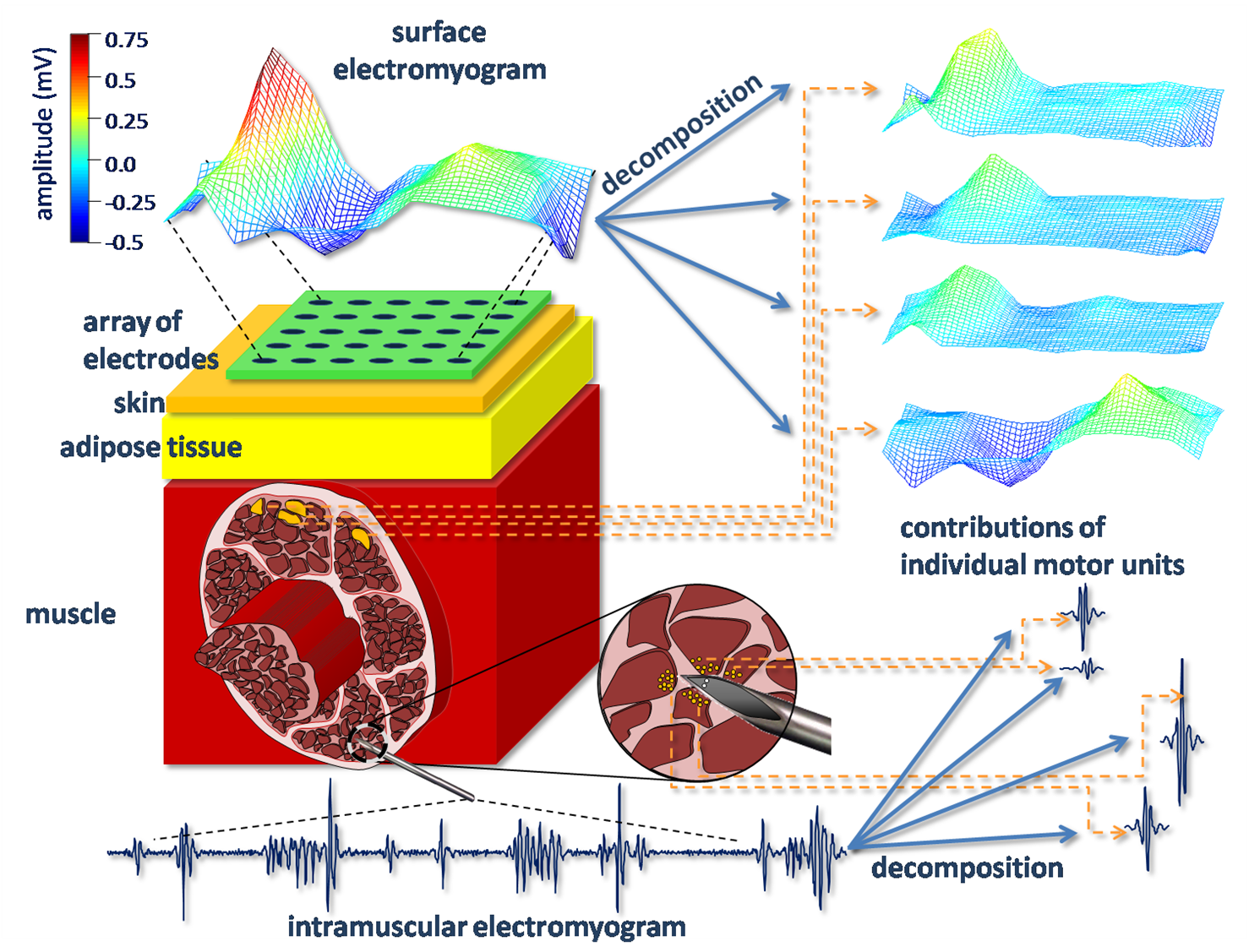 Fig. 2.
Acquisition of surface and intramuscular EMG: The high selectivity of
intramuscular electrodes enables the acquisition of high-fidelity
signals with
contributions from a limited number of motor units. Surface electrodes
are
located at a much larger distance from muscle fibers and exhibit much
lower
selectivity than intramuscular electrodes. This attenuates
morphological
differences between motor unit action potentials of different motor units. Thus, increased spatial
support
(i.e. the number of electrodes) of acquired surface EMG is required to
reliably
discriminate different motor units.
Fig. 2.
Acquisition of surface and intramuscular EMG: The high selectivity of
intramuscular electrodes enables the acquisition of high-fidelity
signals with
contributions from a limited number of motor units. Surface electrodes
are
located at a much larger distance from muscle fibers and exhibit much
lower
selectivity than intramuscular electrodes. This attenuates
morphological
differences between motor unit action potentials of different motor units. Thus, increased spatial
support
(i.e. the number of electrodes) of acquired surface EMG is required to
reliably
discriminate different motor units.
Aforementioned
2D acquisition modality presents
at least two major problems. Firstly, the application of multi-channel
detection systems over the skin surface is more time consuming than the
use of
classic bipolar electrode systems. This can be partially solved by
disposable
and pre-gelled systems which simplify the mounting procedures.
Secondly, large
number of acquired channels calls for advanced information extraction
techniques, being capable of processing large quantities of data. In
this
project, information extraction techniques are being developed by
integrating
the most promising features of state-of-the-art blind source
separation, in
particular those based on time-frequency analysis, independent
component
analysis, sparse component analysis and especially on the novel
convolution
kernel compensation (CKC) technique. The latter was developed and
validated within
the applicant’s Marie Curie EIF project DEMUSE. CKC is fully automatic
and
nonparametric, implicitly resolves superimpositions of motor unit action potentials, and relies
minimally
on anatomic properties of the investigated muscle. Reconstructed motor unit
discharge
patterns are automatically tested against the predefined ranges of
physiological variables (i.e., discharge rate, variability of
inter-pulse
interval, muscle fiber conduction velocity, etc.) and sorted with respect to the
estimated degree of decomposition reliability. The method has been
tested in a
variety of isometric conditions, including simulated and experimental
signals
at constant and variable force levels. In all these tests, the CKC
decomposition
identified complete discharge patterns of up to 25 concurrently active motor units,
more than any other existing surface EMG decomposition method.
Dynamic
contractions
Due to complexity of acquired
EMG,
existing information extraction techniques have mainly been applied to
the
isometric muscle contractions, with the muscle geometry kept constant
during
the measurement session. However, the contractions of human muscles are
almost
always dynamic, with the muscle moving with respect to the skin. During
the dynamic
muscle contractions, the distances between the detection system and the
active motor units change continuously as a function of time (Fig. 3). This
causes
continuous, but substantial changes in the shape of detected motor unit action potentials and
hinders
the extraction of information on individual motor units.
The abovementioned technical
difficulties associated with motor unit recordings in humans limit the accuracy
with
which the muscle control strategies can be established during the
movements. A
common way to study the dynamic movements is to record the electrical
activity
at the surface of the skin above the investigated muscle, estimate its
amplitude, and use it as an indicator of motor unit activity. However, the
change in
the surface EMG should not automatically be attributed to changes in
either motor unit
recruitment or motor unit discharge rate as the amplitude of surface EMG is
farther
influenced by the spatial distribution of motor units within the muscle, muscle
movement with respect to the pick-up electrodes, degree of motor unit discharge
synchronization and fatigue. Therefore, robust, accurate and reliable
extraction of characteristics of individual motor units out of their composite
surface
EMG signals is required.
The
CKC algorithm also exhibits a very low computational complexity and the
studies
of its real-time implementation are already underway at University of
Maribor.
Moreover, over the past 18 months, two different upgrades, namely cyclostationary CKC and sequential CKC, which allow
constant
adaptations of the existing method to the moderate changes in
shapes of motor unit action potentials
have been designed. These
methods are
still under strict experimental validation but already demonstrate
great
potential for a decomposition of dynamic surface EMG recorded during
moderate
muscle movements.
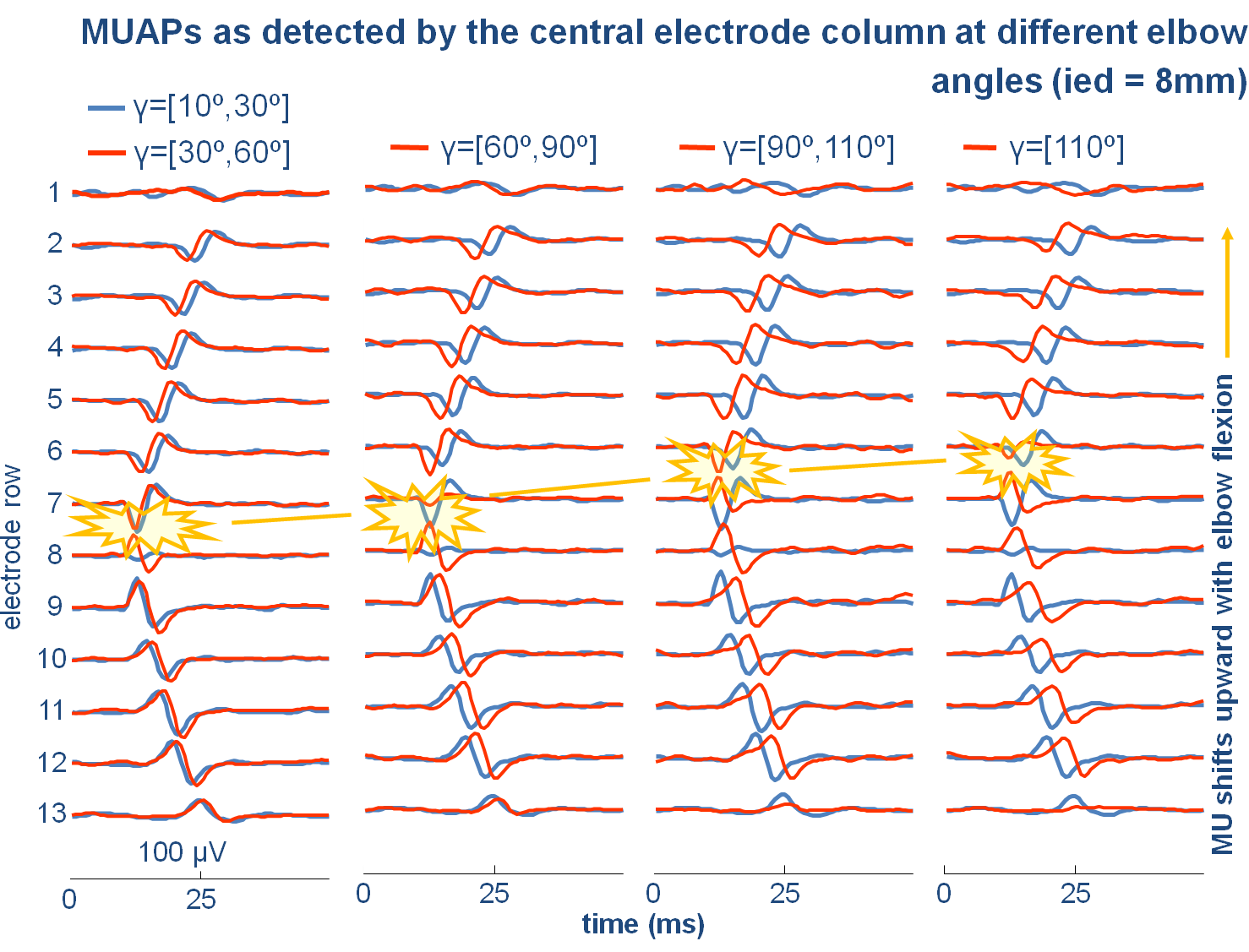 Fig. 3.
Motor unit action potentials (MUAPs) of a single motor unit as detected by the
central column of the electrode array, shown in the upper-right
photo of Fig. 1, from biceps brachii muscle during its
slow dynamic contraction. MUAPs
(red lines) were obtained by
spike-triggered averaging of surface EMG at different ranges of elbow joint
angle γ (0° corresponds to full
elbow
extension). For comparison, the MUAP shapes at elbow joint angle
between 10°
and 30° are shown in blue. A shift of motor unit innervation zone is
clearly
visible.
Fig. 3.
Motor unit action potentials (MUAPs) of a single motor unit as detected by the
central column of the electrode array, shown in the upper-right
photo of Fig. 1, from biceps brachii muscle during its
slow dynamic contraction. MUAPs
(red lines) were obtained by
spike-triggered averaging of surface EMG at different ranges of elbow joint
angle γ (0° corresponds to full
elbow
extension). For comparison, the MUAP shapes at elbow joint angle
between 10°
and 30° are shown in blue. A shift of motor unit innervation zone is
clearly
visible.
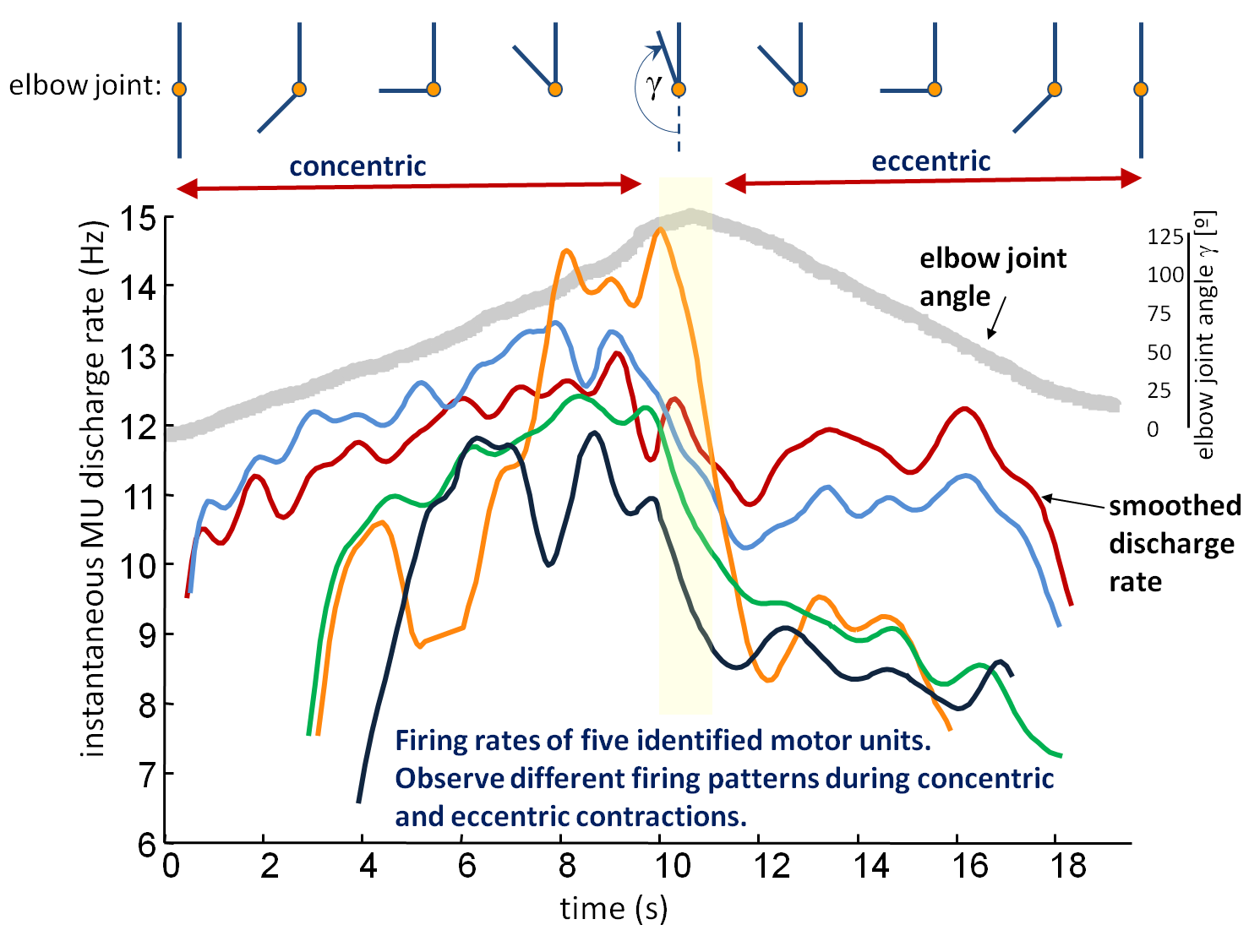 Fig. 4.
Smoothed discharge rates of different motor units identified by
cyclostationary CKC algorithm from biceps brachii muscle during its
slow
dynamical contraction in dependence of elbow joint angle γ
(0° corresponds to full elbow extension). Observe different
firing patterns in concentric and eccentric phases of contraction.
Fig. 4.
Smoothed discharge rates of different motor units identified by
cyclostationary CKC algorithm from biceps brachii muscle during its
slow
dynamical contraction in dependence of elbow joint angle γ
(0° corresponds to full elbow extension). Observe different
firing patterns in concentric and eccentric phases of contraction.
© SSL, Faculty of Electrical
Engineering and Computer Science, University of Maribor
Smetanova 17, SI-2000 Maribor, Slovenia